|
Hello,
I am an undergraduate student at University of California, San Diego studying
Mechanical Engineering (Specialization in Controls and Robotics) and double major in
Mathematics Applied Science with focus on Computer Science and Mechanical Engineering.
|
|
|
|
|
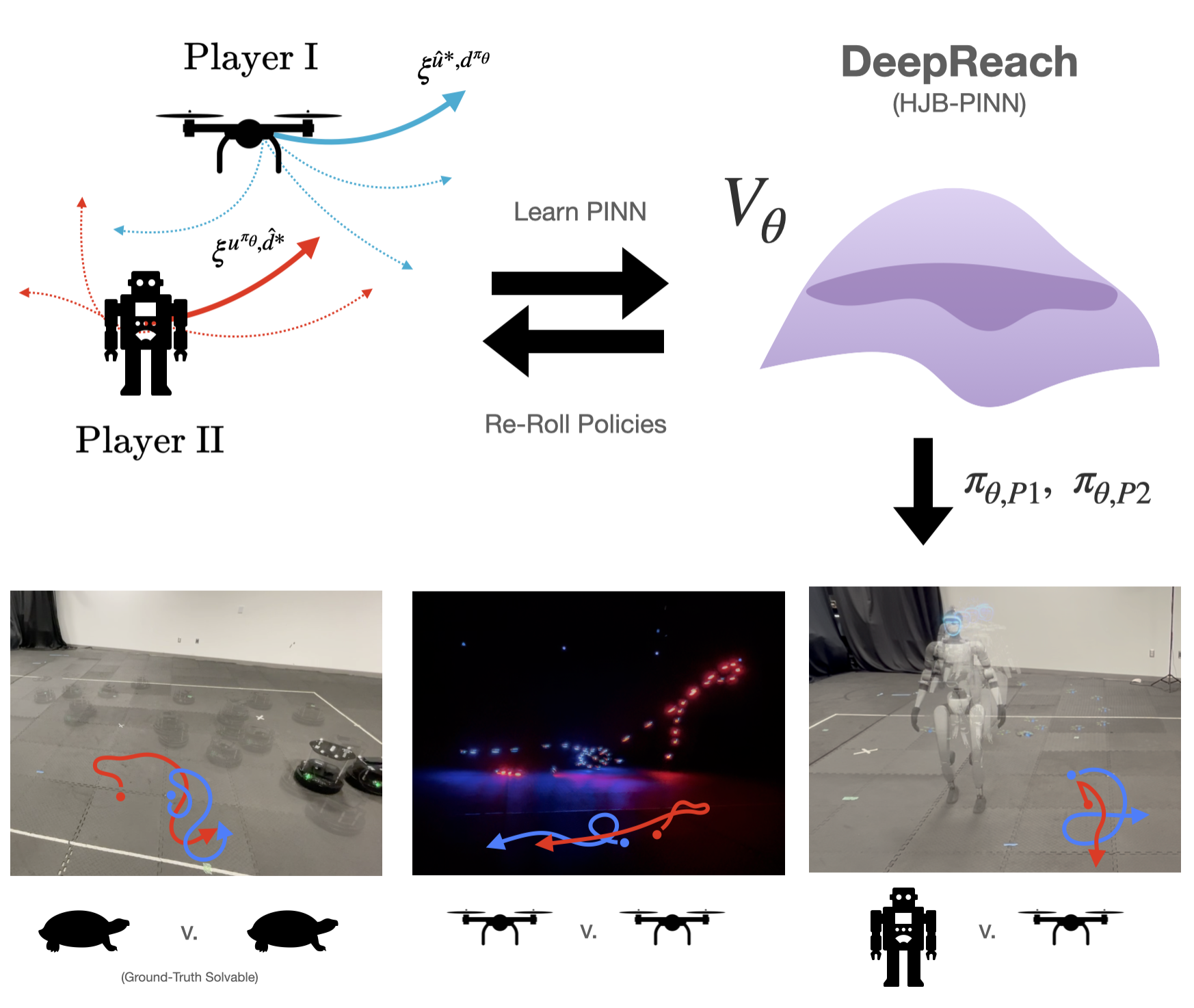
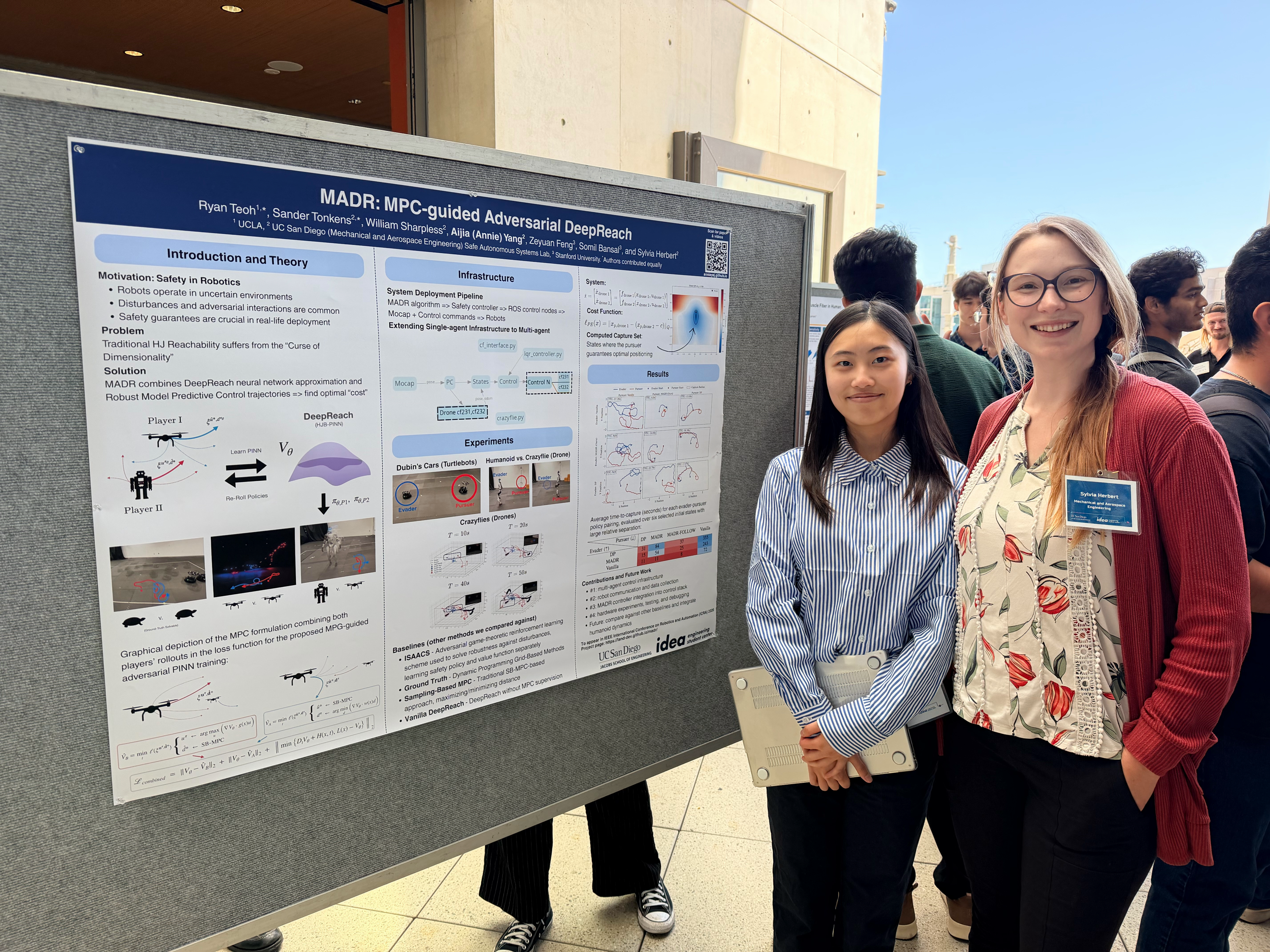
Ryan Teoh, Sander Tonkens, William Sharpless, Aijia Yang, Zeyuan Feng, Somil Bansal, Sylvia Herbert. Paper Accepted to International Conference on Robotics Automation (ICRA) - January, 2026 This paper introduces MADR (MPC-guided Adversarial DeepReach), a framework that improves the learning of differential game value functions for robust control. By integrating active MPC-based supervision into self-supervised Hamilton-Jacobi reachability learning, MADR efficiently approximates two-player, zero-sum differential games and yields optimal strategies for both agents. The method demonstrates strong performance across simulated and real robotic platforms, including high-dimensional systems such as turtlebots, drones, and humanoids. [paper] [website] [poster] [Undergraduate Engineering Research Symposium] [video] |
|
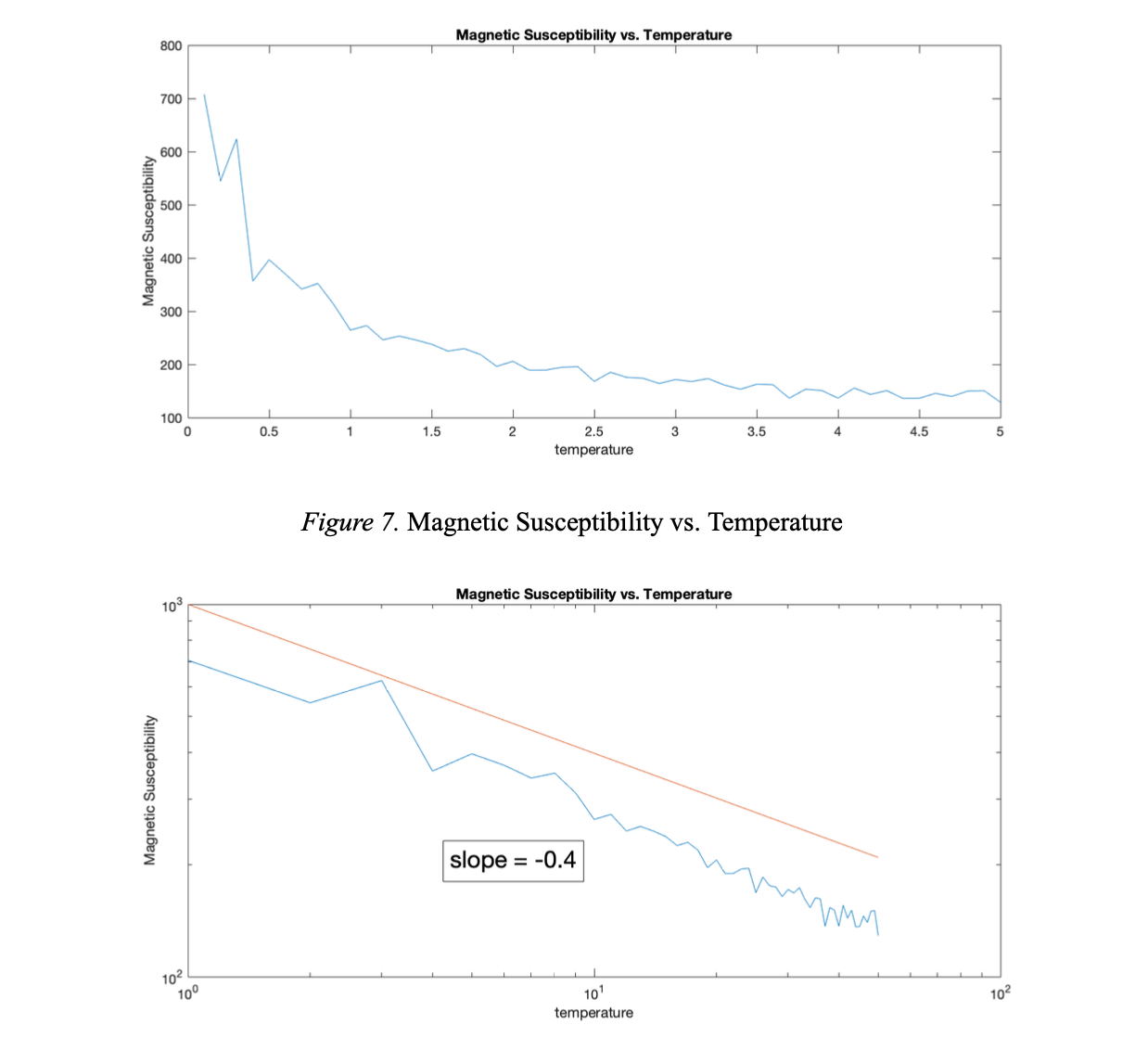
Aijia Yang. PI: Dr. Yuxuan Wang University of Florida SSTP, 2023 This project simulates phase transitions in one-dimensional magnets using the Metropolis Algorithm within a Monte Carlo framework. A preliminary side project computed π via MATLAB by estimating the area under a circle using random sampling and Metropolis updates, providing practice in algorithm implementation. The same approach was applied to the n-site Ising Model to analyze magnetization and magnetic susceptibility. Simulations generate magnetization averages and bar charts to assess reliability. Results demonstrate that in one-dimensional systems, objects rarely retain magnetization, and magnetic susceptibility decreases as temperature rises, illustrating fundamental behaviors of phase transitions in low-dimensional magnetic systems. |

|
Aijia Yang. Advisors: Jon Lamoreux, David Kangas Paper accepted to 3rd International Conference on Computing Innovation and Applied Physics, 2023 Frequent earthquakes cause severe structural damage, yet the 1976 Tangshan Earthquake revealed the resilience of the Forbidden City, whose wooden mortise-tenon structures remained intact. This study investigates the seismic performance of such joints using low-cost, high school level equipment. A custom instrumented hammer was developed and system reliability was validated by matching experimental and Finite Element resonance frequencies. Impact testing showed that mortise-tenon joints increase frictional damping, reducing vibration. Simulations indicate an 11.0% decrease in seismic response, demonstrating the effectiveness of accessible tools in structural analysis. [paper] |
{kind=link}
|
|

|
Annie Yang, Grace Xiao, Nina Sediki, Kelvin Kau. MAE 3 Intro to Mechanical Design, 2024 Inspired by Interstellar, this project involved designing and building a robot that simulates gravity by collecting debris and delivering it to a central scoring zone in a 60-second competition. The robot was developed from scratch, beginning with game strategy and CAD, with a focus on speed, control, and reliability. Fabrication incorporated 3D printing, laser cutting, and machine shop tools to produce custom components. Iterative testing and refinement improved performance under real match conditions. Our team also won the best presentation award. [report] [website] [presentation] |
|
Annie Yang, Natasha Tran, Alva Huang, Emily Liu. DiamondHacks, 2026 1st Place Beginner Track Over 40M people every day use AI to talk about health concerns—but most tools treat each question in isolation. CarePilot is an AI-powered health companion that maintains a structured profile across sleep, stress, and nutrition, enabling more meaningful, personalized support. It combines quick subhealth assessments, context-aware chat, dynamic 7-day meal planning, and actionable recommendations users can execute in real-world workflows. Built with React, Node.js, Google Gemini, and Browser Use Cloud, CarePilot bridges conversation and action—automating tasks like finding groceries or care resources. The result is a continuous, intelligent system that helps users catch early signals and take proactive steps toward better health. [website] [presentation] |

|
Annie Yang, Louis Yu, Felix Fan, Alana Kwan. HackMIT, 2025 Approximately 1.3 billion tons of food is wasted annually, while millions face food insecurity. This project developed a web platform connecting volunteers, stores, and food banks to reduce food waste. Volunteers can easily access opportunities to collect excess food from partner stores and deliver it to local food banks, earning points and community service hours. Stores benefit from reduced disposal costs and enhanced sustainability profiles, while food banks gain a steady supply of rescued food. The platform gamifies participation with leaderboards, achievement badges, and rewards, making environmental action engaging and motivating, and fostering community involvement in sustainability efforts. [website] [presentation] |
|
Annie Yang, Jett Ngo, Benjamin Signer, Saravanan Valliappan, Lina Seto, Aman Palanati, Akari Oh. HKN Projects Group, 2026 As a group, we built and deployed a Next.js web app on Netlify to showcase HKN projects, pairing a modern frontend with a decoupled Decap CMS so non-technical admins can update content directly from the browser. To make the project data interactive, we integrated an embedded AI chatbot powered by a multi-LLM backend and a RAG pipeline, allowing users to ask questions and get instant, accurate answers sourced directly from project documentation. |
|
|
Outside of research and engineering, I enjoy food, road trips, murder mystery books, tennis, cafés, and documenting random moments with friends. Favorite author: Keigo Higashino Favorite books: The Devotion of Suspect X, Journey under the Midnight Sun Favorite food: sushi, udon, matcha, lamb skewers, hotpot |
|
|
Website template by Jon Barron (source code).
|